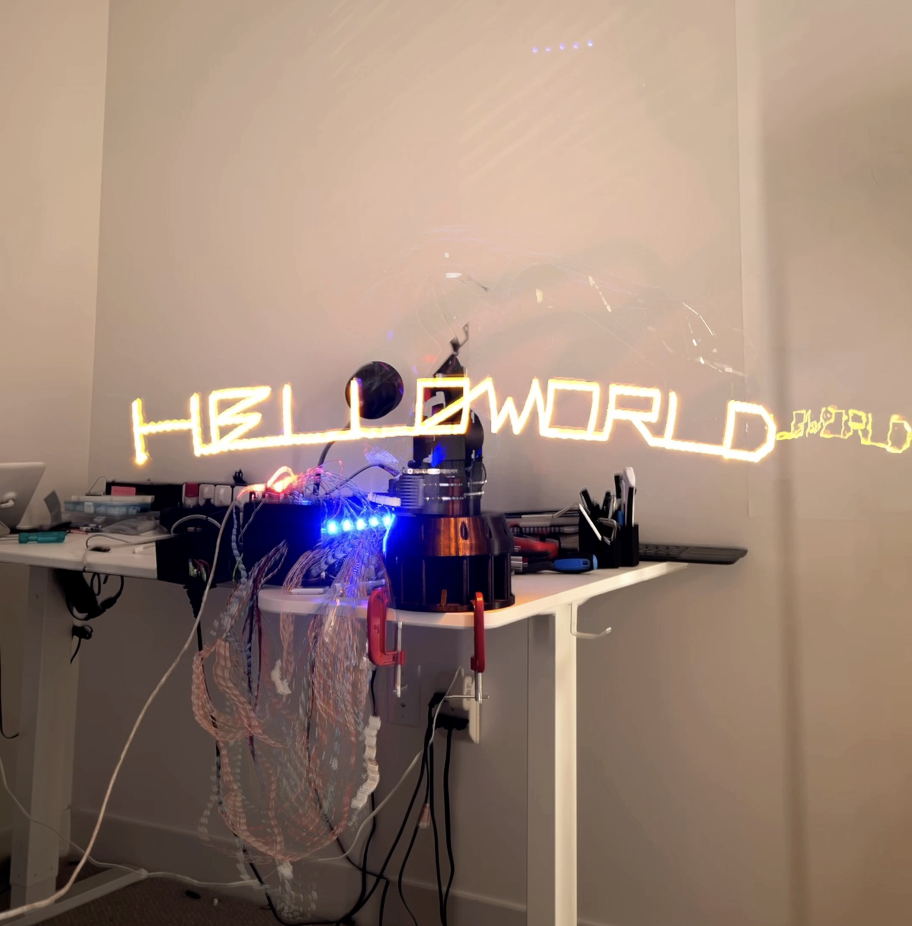
BLADERUNNER.
Light Painting with bladerunner
Bladerunner
6 DOF Robotic arm
March 2023 - Present
Why Build Bladerunner?
As my interest in robotics grew, I felt this deep urge to go on a learning and experimentation spree. Building this robotic arm has been the best way to satiate this urge. It is also incredibly enjoyable to see the robot move.
What is it?
Bladerunner is a fully custom-built project where I designed all mechanical elements from scratch, including the actuators, mechanisms, and circuitry.
The only off-the-shelf components used are NEMA 17 stepper motors, 12-bit encoders, motor drivers, and microcontrollers.
Primary Task: To serve me panipuri !
It is a rather complicated Indian scak to serve in terms of manipulation and perception.
Check out my day-to-day update on my X page.
Thanks to the Bambu lab P1S my life has been much easier. Actutors in J3, 4,5,6 have been designed multiple time over. I tested cycloidal, strainwave and planetray gear actuators.
Design -> Manufacture ->Assemble -> Test -> Repeat on Next Joint I built one joint at a time, from the base up.
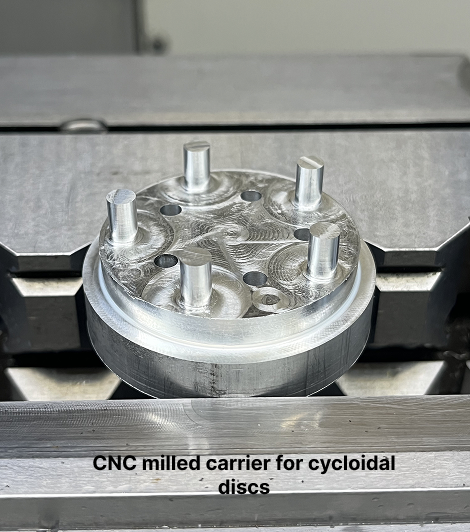
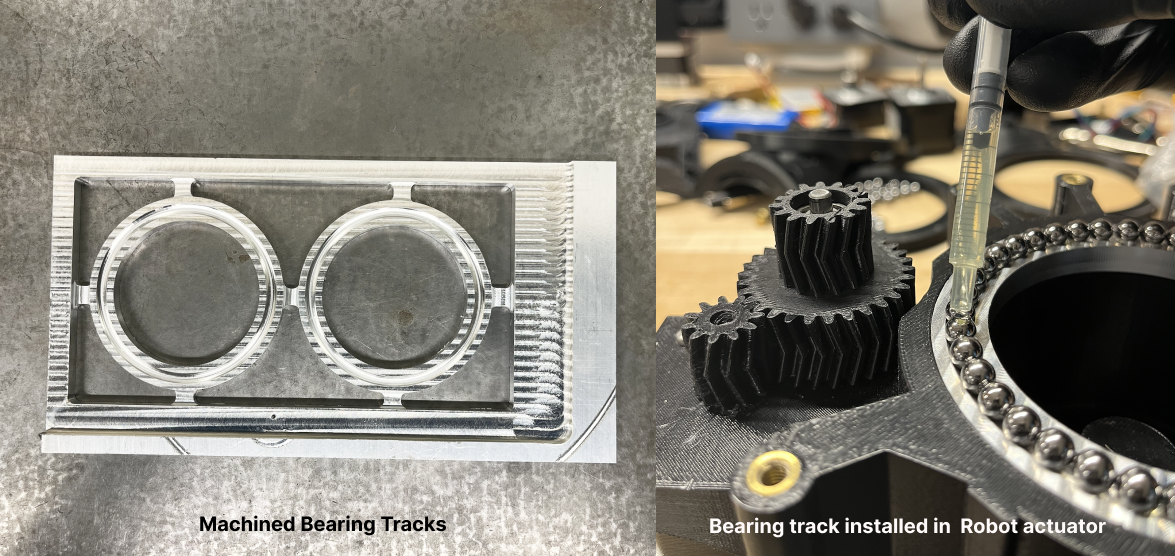
Base/J1 Design: While designing this joint I my primary consideration was the vertical thrust load on the bearings. I did not want to spend money on a large bearing so I machined a pair of bearing tracks for the base.



Methodology
A Fusion360 Render

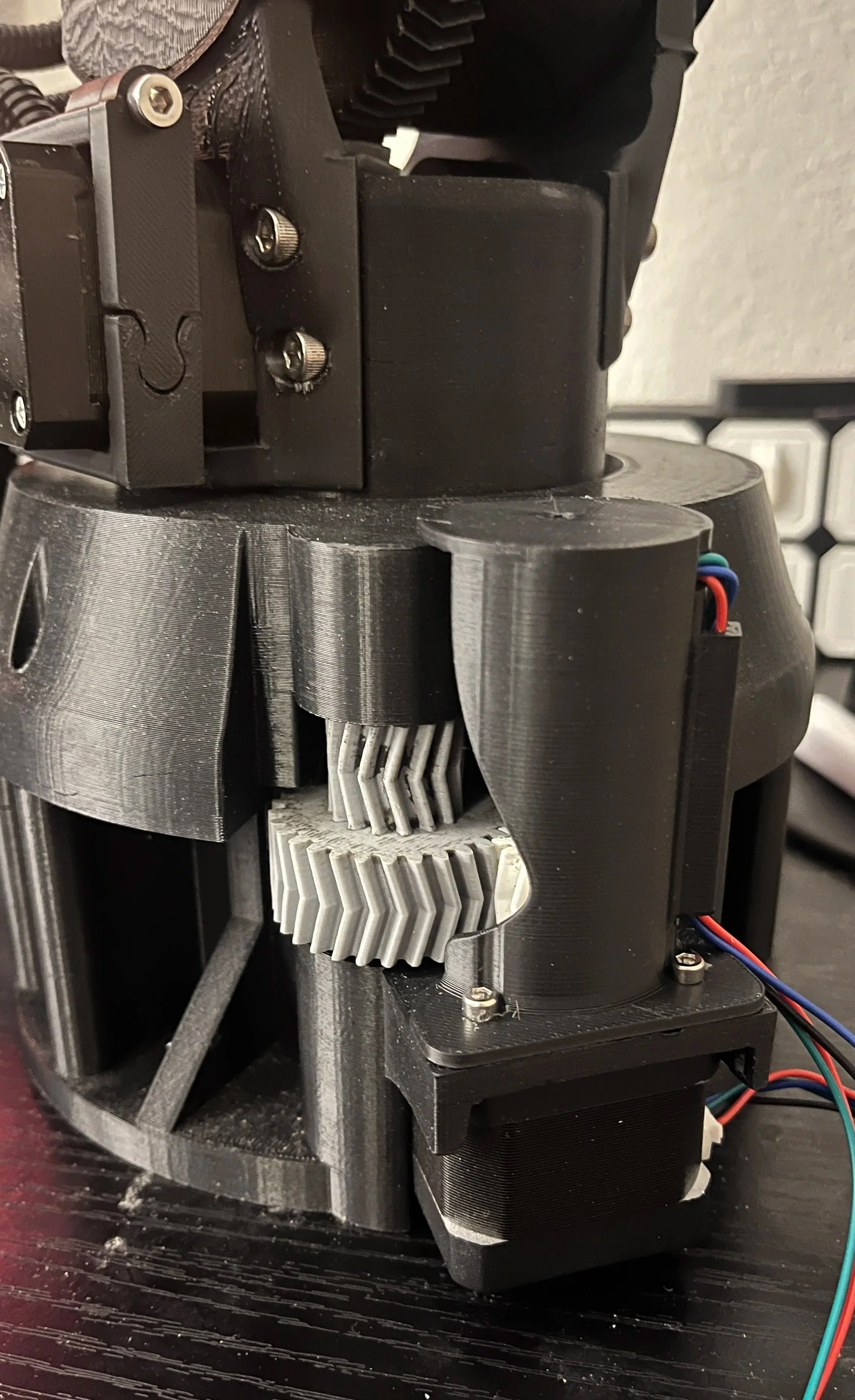
J2 (pictured on left) took me the most time to design. This joint takes the most moment among of all 6 six. Since I was using similar NEMA 17 motors for all joints, I had to reduce J2 the most at 1:34.
The actuator involves a two-stage reduction, a 12:68 spur reduction followed by a 1:6 planetary reduction for a total reduction of 1:34 .

Joint Details. Each actuator is powered by 4 kg.cm stepper motors



Current Status:
Kinematics are implemented, allowing the robot to navigate to specific points in 3D space and follow trajectories in open-loop control.
Up Next:
Designing Gripper, Implementing a vision system, closed loop control for all joints, Designing homing sequence.


J6 Flex Spline Iterations

Cycloidal Actuator no pin design

J5 Encoder housing iterations

J3 Planetary Gears

Strainwave actuator, flex spline printed in TPU

Cycloidal disc and pins
Drawings of Mechanisms & Actuators

Completed Strainwave actuator




J3 encoder gearing